Overview
In the last blog post, Controlling QLab Wirelessly using Motion Sensors, I talked about setting up the Raspberry Pi to send Motion data to QLab via OSC messages. In this post, I will expand on that by building out support for multiple sensors as well as providing a dashboard to display the sensor values.
As part of our Halloween display we will be triggering multiple scenes using multiple motion sensors. I just wanted to demonstrate how I setup Node-Red to handle multiple sensors. I also wanted a way to display the status of the sensors on a dashboard. Using the dashboard, I am able to walk through the scenes while viewing the motion sensor status. This allows easier tuning of where to place and point the sensors. I also discovered when sensors are not connected (in the case when you may be setting up a sensor), a bit of noise passes through the system, triggering cues unexpectedly. I updated the scripts to prevent this.
This is a continuation of the previous post. I will not go into as much detail. Please reference the previous post if you need more detailed steps.
Install Node-Red Dashboard
In order to use the dashboard, we need to install the Node-Red Dashboard.
Step 1: Install Node-Red Dashboard
Install Node-Red Dashboard.
cd ~/.node-red
npm install node-red-dashboard
Step 2: Restart Node-Red
Restart Node-Red so the changes take effect.
node-red-stop
node-red-start&
Configure Node-Red
Now, configure Node-Red to support multiple sensors and the Dashboard.
Step 1: Multiple Sensor Flow
Expand the Node-Red flow based on the prior post.
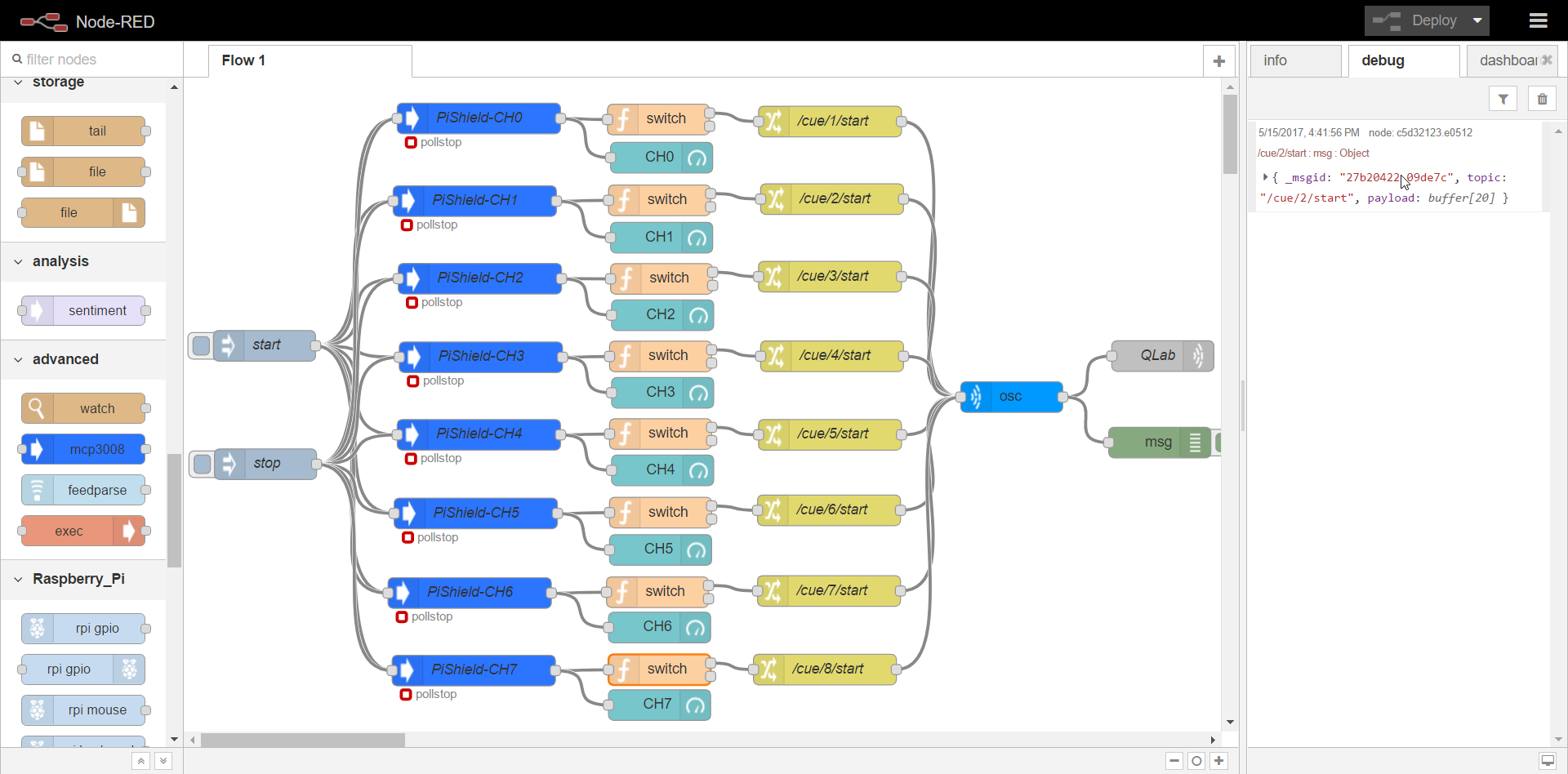
The switch nodes are same as the prior motion switch nodes. I shortened the name so everything fits better in the diagram. I did have to update the script to handle the noise when a sensor is disconnected. The following is the updated script:
// Determine the state of the sensor. 1 = motion
var state = (msg.payload < 64) ? 0 : 1;
// Get the last state
var last = context.get('last')||0;
// Only process changes in state
if (state === last) {
return [ null, null ];
}
// Store the state for next time
context.set('last',state);
// Based on state, return output
if (state === 1) {
return [ msg, null ];
} else {
return [ null, msg ];
}
The CH#’s are  nodes.
Follow the documentation provided by I-CubeX to set this up.
nodes.
Follow the documentation provided by I-CubeX to set this up.
The  nodes should be updated with the associated OSC message for each sensor.
nodes should be updated with the associated OSC message for each sensor.
Step 2: Dashboard
If you followed the instructions provided by I-CubeX, your dashboard should resemble the following:
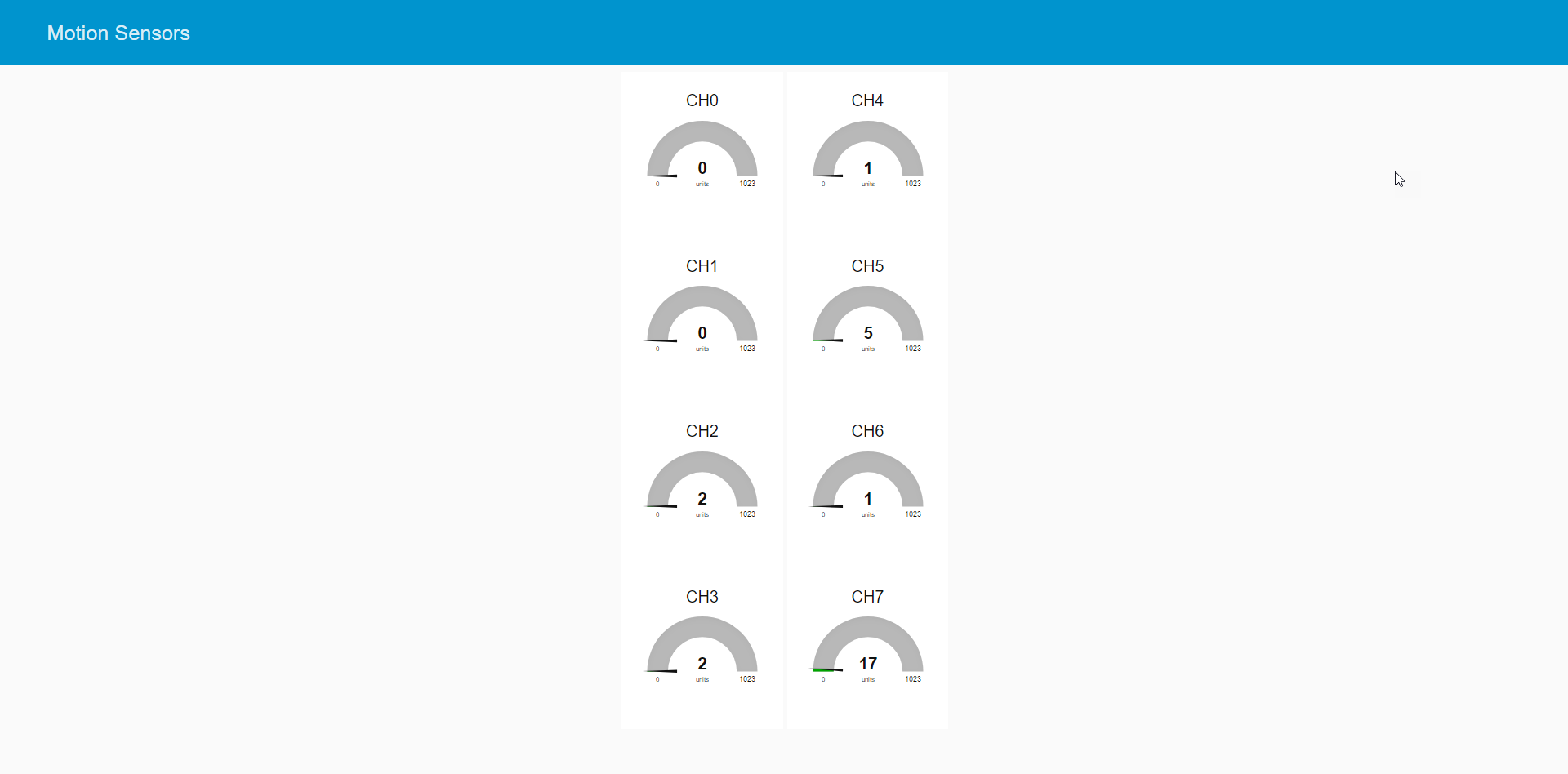
You can navigate to the dashboard using http://[Raspberry Pi IP Address]:1880/ui/
Complete Node-Red Configuration
The complete Node-Red settings are as follows:
[
{
"id": "8868aa19.83a248",
"type": "tab",
"label": "Flow 1"
},
{
"id": "163476c3.8a9749",
"type": "ui_base",
"theme": {
"name": "theme-light",
"lightTheme": {
"default": "#0094CE",
"baseColor": "#0094CE",
"baseFont": "Helvetica Neue",
"edited": true,
"reset": false
},
"darkTheme": {
"default": "#097479",
"baseColor": "#097479",
"baseFont": "Helvetica Neue",
"edited": false
},
"customTheme": {
"name": "Untitled Theme 1",
"default": "#4B7930",
"baseColor": "#4B7930",
"baseFont": "Helvetica Neue"
},
"themeState": {
"base-color": {
"default": "#0094CE",
"value": "#0094CE",
"edited": false
},
"page-titlebar-backgroundColor": {
"value": "#0094CE",
"edited": false
},
"page-backgroundColor": {
"value": "#fafafa",
"edited": false
},
"page-sidebar-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"group-textColor": {
"value": "#1bbfff",
"edited": false
},
"group-borderColor": {
"value": "#ffffff",
"edited": false
},
"group-backgroundColor": {
"value": "#ffffff",
"edited": false
},
"widget-textColor": {
"value": "#111111",
"edited": false
},
"widget-backgroundColor": {
"value": "#0094ce",
"edited": false
},
"widget-borderColor": {
"value": "#ffffff",
"edited": false
}
}
},
"site": {
"name": "Node-RED Dashboard",
"hideToolbar": "false",
"allowSwipe": "false",
"dateFormat": "DD/MM/YYYY",
"sizes": {
"sx": 48,
"sy": 48,
"gx": 6,
"gy": 6,
"cx": 6,
"cy": 6,
"px": 0,
"py": 0
}
}
},
{
"id": "a2227267.5ae3e",
"type": "ui_tab",
"z": "",
"name": "Motion Sensors",
"icon": "dashboard",
"order": 1
},
{
"id": "d3cd702.a4f079",
"type": "ui_group",
"z": "",
"name": "Group 1",
"tab": "a2227267.5ae3e",
"order": 1,
"disp": false,
"width": "3"
},
{
"id": "20378d8c.019922",
"type": "ui_group",
"z": "",
"name": "Group 2",
"tab": "a2227267.5ae3e",
"order": 2,
"disp": false,
"width": "3"
},
{
"id": "a2b77e56.ec95f",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH0",
"device": "/dev/spidev0.0",
"mode": "0x80",
"interval": "100",
"x": 289.1000061035156,
"y": 40.0000114440918,
"wires": [
[
"19ecaf33.969551",
"69c66069.e7674"
]
]
},
{
"id": "125a1636.bf6a1a",
"type": "inject",
"z": "8868aa19.83a248",
"name": "start",
"topic": "",
"payload": "start",
"payloadType": "str",
"repeat": "",
"crontab": "",
"once": false,
"x": 79.10001373291016,
"y": 262.8000087738037,
"wires": [
[
"a2b77e56.ec95f",
"f8b068f8.c0c498",
"43a4e6da.bfb578",
"55d477d5.210cf8",
"2e63e25.2db651e",
"1aed5bef.36d564",
"7bcc233e.33a7ac",
"18834ca0.2a82a3"
]
]
},
{
"id": "7158a004.84109",
"type": "inject",
"z": "8868aa19.83a248",
"name": "stop",
"topic": "",
"payload": "stop",
"payloadType": "str",
"repeat": "",
"crontab": "",
"once": false,
"x": 80.10001373291016,
"y": 378.8000030517578,
"wires": [
[
"a2b77e56.ec95f",
"f8b068f8.c0c498",
"43a4e6da.bfb578",
"55d477d5.210cf8",
"2e63e25.2db651e",
"1aed5bef.36d564",
"7bcc233e.33a7ac",
"18834ca0.2a82a3"
]
]
},
{
"id": "8706555e.921028",
"type": "osc",
"z": "8868aa19.83a248",
"name": "",
"path": "",
"metadata": false,
"x": 811.1001205444336,
"y": 313.00000953674316,
"wires": [
[
"57b9f7c4.cd8a08",
"c5d32123.e0512"
]
]
},
{
"id": "57b9f7c4.cd8a08",
"type": "udp out",
"z": "8868aa19.83a248",
"name": "QLab",
"addr": "10.81.95.117",
"iface": "",
"port": "53000",
"ipv": "udp4",
"outport": "",
"base64": false,
"multicast": "false",
"x": 959.1000289916992,
"y": 272.8000431060791,
"wires": []
},
{
"id": "c5d32123.e0512",
"type": "debug",
"z": "8868aa19.83a248",
"name": "",
"active": true,
"console": "false",
"complete": "true",
"x": 956.1000289916992,
"y": 357.6000156402588,
"wires": []
},
{
"id": "150291d7.947bde",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/1/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/1/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 633.1001167297363,
"y": 43.000000953674316,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "19ecaf33.969551",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 465.10005950927734,
"y": 41.199984550476074,
"wires": [
[
"150291d7.947bde"
],
[]
]
},
{
"id": "f8b068f8.c0c498",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH1",
"device": "/dev/spidev0.0",
"mode": "0x90",
"interval": "100",
"x": 285.1000061035156,
"y": 121,
"wires": [
[
"a2cde090.da35d",
"e0555eb1.b183a"
]
]
},
{
"id": "43a4e6da.bfb578",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH2",
"device": "/dev/spidev0.0",
"mode": "0xA0",
"interval": "100",
"x": 290.1000061035156,
"y": 197.00000667572021,
"wires": [
[
"1d539b1a.0c5a55",
"6c73852e.2c763c"
]
]
},
{
"id": "55d477d5.210cf8",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH3",
"device": "/dev/spidev0.0",
"mode": "0xB0",
"interval": "100",
"x": 291.1000061035156,
"y": 274.0000333786011,
"wires": [
[
"79fece06.7a2b7",
"ea5ce738.4915e8"
]
]
},
{
"id": "2e63e25.2db651e",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH4",
"device": "/dev/spidev0.0",
"mode": "0xC0",
"interval": "100",
"x": 289.1000556945801,
"y": 350.0000247955322,
"wires": [
[
"e48906ea.eb5fc8",
"3ef27281.e82d7e"
]
]
},
{
"id": "1aed5bef.36d564",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH5",
"device": "/dev/spidev0.0",
"mode": "0xD0",
"interval": "100",
"x": 286.1000061035156,
"y": 427.0000123977661,
"wires": [
[
"202f6ced.d6c3c4",
"5a1229ef.637c18"
]
]
},
{
"id": "7bcc233e.33a7ac",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH6",
"device": "/dev/spidev0.0",
"mode": "0xE0",
"interval": "100",
"x": 280.1000328063965,
"y": 505.0000286102295,
"wires": [
[
"e557c2a6.b866e",
"a42b8494.958228"
]
]
},
{
"id": "18834ca0.2a82a3",
"type": "mcp3008",
"z": "8868aa19.83a248",
"name": "PiShield-CH7",
"device": "/dev/spidev0.0",
"mode": "0xF0",
"interval": "100",
"x": 284.1000556945801,
"y": 581.0000019073486,
"wires": [
[
"e0790032.8dff3",
"b5d60eb7.e296e"
]
]
},
{
"id": "a2cde090.da35d",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 466.1000633239746,
"y": 120.20000457763672,
"wires": [
[
"96a54092.309c7"
],
[]
]
},
{
"id": "1d539b1a.0c5a55",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 468.10003662109375,
"y": 197.20001220703125,
"wires": [
[
"4ce4c0af.29f62"
],
[]
]
},
{
"id": "79fece06.7a2b7",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 467.10003662109375,
"y": 273.2000370025635,
"wires": [
[
"6800b762.bf2d58"
],
[]
]
},
{
"id": "e48906ea.eb5fc8",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 467.1000862121582,
"y": 349.2000370025635,
"wires": [
[
"a5beea8d.b0b1a8"
],
[]
]
},
{
"id": "202f6ced.d6c3c4",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 467.10003662109375,
"y": 426.20001220703125,
"wires": [
[
"f1a0355c.0baf58"
],
[]
]
},
{
"id": "e557c2a6.b866e",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 464.1000633239746,
"y": 504.20004081726074,
"wires": [
[
"ba8326dc.1e1868"
],
[]
]
},
{
"id": "e0790032.8dff3",
"type": "function",
"z": "8868aa19.83a248",
"name": "switch",
"func": "// Determine the state of the sensor. 1 = motion\nvar state = (msg.payload < 64) ? 0 : 1;\n\n// Get the last state\nvar last = context.get('last')||0;\n\n// Only process changes in state\nif (state === last) {\n return [ null, null ];\n}\n\n// Store the state for next time\ncontext.set('last',state);\n\n// Based on state, return output\nif (state === 1) {\n return [ msg, null ];\n} else {\n return [ null, msg ];\n}\n",
"outputs": "2",
"noerr": 0,
"x": 466.1000862121582,
"y": 580.2000141143799,
"wires": [
[
"91472f13.11fd2"
],
[]
]
},
{
"id": "96a54092.309c7",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/2/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/2/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 635.1000671386719,
"y": 119.00000381469727,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "4ce4c0af.29f62",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/3/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/3/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 633.1000671386719,
"y": 195.0000057220459,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "6800b762.bf2d58",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/4/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/4/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 635.1000671386719,
"y": 273.00000858306885,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "a5beea8d.b0b1a8",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/5/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/5/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 633.1000671386719,
"y": 350.0000104904175,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "f1a0355c.0baf58",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/6/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/6/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 632.1000671386719,
"y": 424.0000123977661,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "ba8326dc.1e1868",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/7/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/7/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 632.1000671386719,
"y": 503.00001525878906,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "91472f13.11fd2",
"type": "change",
"z": "8868aa19.83a248",
"name": "/cue/8/start",
"rules": [
{
"t": "set",
"p": "topic",
"pt": "msg",
"to": "/cue/8/start",
"tot": "str"
},
{
"t": "delete",
"p": "payload",
"pt": "msg"
}
],
"action": "",
"property": "",
"from": "",
"to": "",
"reg": false,
"x": 628.1000671386719,
"y": 580.0000171661377,
"wires": [
[
"8706555e.921028"
]
]
},
{
"id": "b5d60eb7.e296e",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "20378d8c.019922",
"order": 4,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH7",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 466.10011291503906,
"y": 614.8000679016113,
"wires": []
},
{
"id": "a42b8494.958228",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "20378d8c.019922",
"order": 3,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH6",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 466.1000633239746,
"y": 538.8000164031982,
"wires": []
},
{
"id": "5a1229ef.637c18",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "20378d8c.019922",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH5",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 467.1000633239746,
"y": 462.8000144958496,
"wires": []
},
{
"id": "3ef27281.e82d7e",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "20378d8c.019922",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH4",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 469.10011291503906,
"y": 384.8000602722168,
"wires": []
},
{
"id": "ea5ce738.4915e8",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "d3cd702.a4f079",
"order": 4,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH3",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 469.1000633239746,
"y": 308.80005836486816,
"wires": []
},
{
"id": "6c73852e.2c763c",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "d3cd702.a4f079",
"order": 3,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH2",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 469.1000633239746,
"y": 232.8000316619873,
"wires": []
},
{
"id": "e0555eb1.b183a",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "d3cd702.a4f079",
"order": 2,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH1",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 468.1000633239746,
"y": 156.80000495910645,
"wires": []
},
{
"id": "69c66069.e7674",
"type": "ui_gauge",
"z": "8868aa19.83a248",
"name": "",
"group": "d3cd702.a4f079",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "CH0",
"label": "units",
"format": "",
"min": 0,
"max": "1023",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 468.1000633239746,
"y": 78.40002059936523,
"wires": []
}
]
Running
- Make sure the sensor(s) are plugged in and the Raspberry Pi is powered on.
- Navigate to http://[RASPBERRY PI IP ADDRESS]:1880/
- Click the Start (inject node)
- The Raspberry Pi will now send OSC commands to QLab.
- View the dashboard at: http://[Raspberry Pi IP Address]:1880/ui/